Category:SVG control theory
Jump to navigation
Jump to search
Media in category "SVG control theory"
The following 112 files are in this category, out of 112 total.
-
 2nd Order Damping Ratios.svg 720 × 460; 85 KB
2nd Order Damping Ratios.svg 720 × 460; 85 KB
-
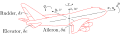 Aeroplane Coordinates and Control.svg 700 × 200; 78 KB
Aeroplane Coordinates and Control.svg 700 × 200; 78 KB
-
 AnalogPositionControlSystemPic1a.svg 744 × 660; 154 KB
AnalogPositionControlSystemPic1a.svg 744 × 660; 154 KB
-
 Antimetric electrical example.svg 1,076 × 994; 75 KB
Antimetric electrical example.svg 1,076 × 994; 75 KB
-
 Antimetric forces.svg 614 × 684; 11 KB
Antimetric forces.svg 614 × 684; 11 KB
-
 Antimetric intermediate example.svg 1,076 × 994; 52 KB
Antimetric intermediate example.svg 1,076 × 994; 52 KB
-
 Antimetric physical example.svg 1,331 × 514; 34 KB
Antimetric physical example.svg 1,331 × 514; 34 KB
-
 Ball and beam system.svg 531 × 177; 58 KB
Ball and beam system.svg 531 × 177; 58 KB
-
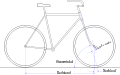 Bicycle dimensions (german).svg 563 × 351; 22 KB
Bicycle dimensions (german).svg 563 × 351; 22 KB
-
 Bimodal density.svg 512 × 512; 29 KB
Bimodal density.svg 512 × 512; 29 KB
-
 Cart-pendulum.svg 512 × 563; 2 KB
Cart-pendulum.svg 512 × 563; 2 KB
-
 Coaxial transmission line wih one source and one load.svg 531 × 248; 22 KB
Coaxial transmission line wih one source and one load.svg 531 × 248; 22 KB
-
 Control Theory Example 1a.svg 720 × 460; 78 KB
Control Theory Example 1a.svg 720 × 460; 78 KB
-
 CUSUM Algorithm.svg 521 × 321; 41 KB
CUSUM Algorithm.svg 521 × 321; 41 KB
-
 Damped Oscillation2.svg 444 × 386; 70 KB
Damped Oscillation2.svg 444 × 386; 70 KB
-
 Damped.svg 600 × 480; 6 KB
Damped.svg 600 × 480; 6 KB
-
 Damping 1.svg 650 × 356; 69 KB
Damping 1.svg 650 × 356; 69 KB
-
 Deadband plot.svg 512 × 512; 1 KB
Deadband plot.svg 512 × 512; 1 KB
-
 Deadband.svg 512 × 512; 1 KB
Deadband.svg 512 × 512; 1 KB
-
 Delayedfirstorderhold.impulseresponse.svg 567 × 354; 1 KB
Delayedfirstorderhold.impulseresponse.svg 567 × 354; 1 KB
-
 Delayedfirstorderhold.signal.svg 567 × 390; 3 KB
Delayedfirstorderhold.signal.svg 567 × 390; 3 KB
-
 Diagrama de blocs controlador PID.svg 920 × 383; 95 KB
Diagrama de blocs controlador PID.svg 920 × 383; 95 KB
-
 Double-Pendulum.svg 294 × 398; 12 KB
Double-Pendulum.svg 294 × 398; 12 KB
-
 Error detector symbol.svg 580 × 400; 1 KB
Error detector symbol.svg 580 × 400; 1 KB
-
 Exemplo de resultado obtido com o filtro de kalman.svg 769 × 577; 15 KB
Exemplo de resultado obtido com o filtro de kalman.svg 769 × 577; 15 KB
-
 Filtered message threshold.svg 355 × 107; 29 KB
Filtered message threshold.svg 355 × 107; 29 KB
-
 Filtered message.svg 355 × 121; 22 KB
Filtered message.svg 355 × 121; 22 KB
-
 Filtr Kalmana.svg 510 × 480; 28 KB
Filtr Kalmana.svg 510 × 480; 28 KB
-
 Finite element solution.svg 1,235 × 863; 58 KB
Finite element solution.svg 1,235 × 863; 58 KB
-
 First order sliding mode control.svg 512 × 459; 27 KB
First order sliding mode control.svg 512 × 459; 27 KB
-
 Firstorderhold.impulseresponse.svg 567 × 354; 1,016 bytes
Firstorderhold.impulseresponse.svg 567 × 354; 1,016 bytes
-
 Firstorderhold.signal.svg 567 × 354; 3 KB
Firstorderhold.signal.svg 567 × 354; 3 KB
-
 General closed loop feedback system with proportional controller.svg 400 × 120; 37 KB
General closed loop feedback system with proportional controller.svg 400 × 120; 37 KB
-
 General closed loop feedback system-fr.svg 400 × 120; 36 KB
General closed loop feedback system-fr.svg 400 × 120; 36 KB
-
 General closed loop feedback system.svg 400 × 120; 35 KB
General closed loop feedback system.svg 400 × 120; 35 KB
-
 General closed loop unity feedback system.svg 400 × 96; 29 KB
General closed loop unity feedback system.svg 400 × 96; 29 KB
-
 General open loop system.svg 240 × 48; 11 KB
General open loop system.svg 240 × 48; 11 KB
-
 Hard separation.svg 680 × 573; 34 KB
Hard separation.svg 680 × 573; 34 KB
-
 Hodges estimator risk function.svg 512 × 512; 46 KB
Hodges estimator risk function.svg 512 × 512; 46 KB
-
 I-controller-symbol-1.svg 300 × 150; 3 KB
I-controller-symbol-1.svg 300 × 150; 3 KB
-
 I-controller-symbol-2.svg 300 × 110; 893 bytes
I-controller-symbol-2.svg 300 × 110; 893 bytes
-
 Ideal feedback model.svg 733 × 269; 994 bytes
Ideal feedback model.svg 733 × 269; 994 bytes
-
 Idealer D Sprungantwort.svg 260 × 230; 4 KB
Idealer D Sprungantwort.svg 260 × 230; 4 KB
-
 Idealer I Sprungantwort.svg 370 × 210; 7 KB
Idealer I Sprungantwort.svg 370 × 210; 7 KB
-
 Idealer P Sprungantwort.svg 260 × 150; 5 KB
Idealer P Sprungantwort.svg 260 × 150; 5 KB
-
 Idealer PD Sprungantwort.svg 260 × 230; 5 KB
Idealer PD Sprungantwort.svg 260 × 230; 5 KB
-
 Idealer PI Sprungantwort.svg 500 × 260; 10 KB
Idealer PI Sprungantwort.svg 500 × 260; 10 KB
-
 Idealer PID Sprungantwort.svg 500 × 260; 11 KB
Idealer PID Sprungantwort.svg 500 × 260; 11 KB
-
 Illustration of causal and non-causal filters.svg 688 × 621; 65 KB
Illustration of causal and non-causal filters.svg 688 × 621; 65 KB
-
 Leistungsfaktorkorrekturfilter-Blockschaltbild.svg 550 × 350; 31 KB
Leistungsfaktorkorrekturfilter-Blockschaltbild.svg 550 × 350; 31 KB
-
 Lms filter.svg 11,165 × 6,523; 5 KB
Lms filter.svg 11,165 × 6,523; 5 KB
-
 Lock-in amplifier.svg 1,163 × 889; 39 KB
Lock-in amplifier.svg 1,163 × 889; 39 KB
-
 Luenberger Observer.svg 1,052 × 744; 76 KB
Luenberger Observer.svg 1,052 × 744; 76 KB
-
 Modelo ideal de realimentación.svg 720 × 280; 10 KB
Modelo ideal de realimentación.svg 720 × 280; 10 KB
-
 Moving Summing Junction beyond Block 1.svg 240 × 75; 15 KB
Moving Summing Junction beyond Block 1.svg 240 × 75; 15 KB
-
 Moving Summing Junction beyond Block 2.svg 240 × 100; 18 KB
Moving Summing Junction beyond Block 2.svg 240 × 100; 18 KB
-
 Moving Summing Junction in front of Block 1.svg 240 × 75; 15 KB
Moving Summing Junction in front of Block 1.svg 240 × 75; 15 KB
-
 Moving Summing Junction in front of Block 2.svg 240 × 95; 18 KB
Moving Summing Junction in front of Block 2.svg 240 × 95; 18 KB
-
 Moving Takeoff Point ahead of a Summing Junction 1.svg 240 × 80; 15 KB
Moving Takeoff Point ahead of a Summing Junction 1.svg 240 × 80; 15 KB
-
 Moving Takeoff Point ahead of a Summing Junction 2.svg 240 × 110; 18 KB
Moving Takeoff Point ahead of a Summing Junction 2.svg 240 × 110; 18 KB
-
 Moving Takeoff Point beyond a Summing Junction 1.svg 240 × 100; 16 KB
Moving Takeoff Point beyond a Summing Junction 1.svg 240 × 100; 16 KB
-
 Moving Takeoff Point beyond a Summing Junction 2.svg 240 × 120; 19 KB
Moving Takeoff Point beyond a Summing Junction 2.svg 240 × 120; 19 KB
-
 Moving Takeoff Point beyond Block 1.svg 240 × 80; 14 KB
Moving Takeoff Point beyond Block 1.svg 240 × 80; 14 KB
-
 Moving Takeoff Point beyond Block 2.svg 240 × 100; 18 KB
Moving Takeoff Point beyond Block 2.svg 240 × 100; 18 KB
-
 Moving Takeoff Point in front of Block 1.svg 240 × 80; 14 KB
Moving Takeoff Point in front of Block 1.svg 240 × 80; 14 KB
-
 Moving Takeoff Point in front of Block 2.svg 240 × 100; 17 KB
Moving Takeoff Point in front of Block 2.svg 240 × 100; 17 KB
-
 MPC scheme basic.svg 434 × 241; 141 KB
MPC scheme basic.svg 434 × 241; 141 KB
-
 MRAC.svg 585 × 232; 7 KB
MRAC.svg 585 × 232; 7 KB
-
 OLS example weight vs height fitted line.svg 360 × 239; 23 KB
OLS example weight vs height fitted line.svg 360 × 239; 23 KB
-
 OLS example weight vs height residuals.svg 360 × 203; 14 KB
OLS example weight vs height residuals.svg 360 × 203; 14 KB
-
 OLS example weight vs height scatterplot.svg 360 × 239; 22 KB
OLS example weight vs height scatterplot.svg 360 × 239; 22 KB
-
 OLS geometric interpretation.svg 658 × 440; 24 KB
OLS geometric interpretation.svg 658 × 440; 24 KB
-
 Original message.svg 327 × 121; 27 KB
Original message.svg 327 × 121; 27 KB
-
 P-controller-symbol-1.svg 300 × 150; 845 bytes
P-controller-symbol-1.svg 300 × 150; 845 bytes
-
 P-controller-symbol-2.svg 300 × 110; 765 bytes
P-controller-symbol-2.svg 300 × 110; 765 bytes
-
 Phase portrait center.svg 177 × 177; 15 KB
Phase portrait center.svg 177 × 177; 15 KB
-
 PI controller.svg 414 × 122; 35 KB
PI controller.svg 414 × 122; 35 KB
-
 PID en updated feedback.svg 720 × 480; 86 KB
PID en updated feedback.svg 720 × 480; 86 KB
-
 PID en updated.svg 980 × 383; 87 KB
PID en updated.svg 980 × 383; 87 KB
-
 PID en.svg 971 × 345; 90 KB
PID en.svg 971 × 345; 90 KB
-
 PLL time domain model.svg 290 × 112; 41 KB
PLL time domain model.svg 290 × 112; 41 KB
-
 Predictivefirstorderhold.impulseresponse.svg 567 × 425; 1 KB
Predictivefirstorderhold.impulseresponse.svg 567 × 425; 1 KB
-
 Predictivefirstorderhold.signal.svg 567 × 390; 3 KB
Predictivefirstorderhold.signal.svg 567 × 390; 3 KB
-
 Pt1-controller-symbol-1.svg 300 × 150; 910 bytes
Pt1-controller-symbol-1.svg 300 × 150; 910 bytes
-
 Pt2-controller-symbol-1.svg 300 × 150; 5 KB
Pt2-controller-symbol-1.svg 300 × 150; 5 KB
-
 Received message.svg 327 × 121; 23 KB
Received message.svg 327 × 121; 23 KB
-
 Reglersystem.svg 380 × 170; 6 KB
Reglersystem.svg 380 × 170; 6 KB
-
 S-Domain Multiplication Block.svg 240 × 50; 7 KB
S-Domain Multiplication Block.svg 240 × 50; 7 KB
-
 S-Domain Series Block.svg 240 × 50; 7 KB
S-Domain Series Block.svg 240 × 50; 7 KB
-
 Sampled signal.svg 886 × 461; 27 KB
Sampled signal.svg 886 × 461; 27 KB
-
 Sampled.signal.svg 585 × 330; 2 KB
Sampled.signal.svg 585 × 330; 2 KB
-
 Second order under-damped response.svg 600 × 500; 30 KB
Second order under-damped response.svg 600 × 500; 30 KB
-
 Setzmaschine.svg 650 × 769; 42 KB
Setzmaschine.svg 650 × 769; 42 KB
-
 Sistema de control bàsic amb realimentació.svg 680 × 280; 10 KB
Sistema de control bàsic amb realimentació.svg 680 × 280; 10 KB
-
 Spannungsregler Beispielaufgabe Blackbox.svg 950 × 580; 34 KB
Spannungsregler Beispielaufgabe Blackbox.svg 950 × 580; 34 KB
-
 Step PT1.svg 525 × 395; 84 KB
Step PT1.svg 525 × 395; 84 KB
-
 Step response for two-pole feedback amplifier-ru.svg 571 × 565; 32 KB
Step response for two-pole feedback amplifier-ru.svg 571 × 565; 32 KB
-
 Step response for two-pole feedback amplifier.PNG 465 × 496; 53 KB
Step response for two-pole feedback amplifier.PNG 465 × 496; 53 KB
-
 Step-PT2.svg 525 × 395; 120 KB
Step-PT2.svg 525 × 395; 120 KB
-
 Time Convolution Block.svg 240 × 50; 7 KB
Time Convolution Block.svg 240 × 50; 7 KB
-
 Time-Domain Transfer Block.svg 240 × 50; 6 KB
Time-Domain Transfer Block.svg 240 × 50; 6 KB
-
 Totzeit-controller-symbol-1.svg 300 × 150; 4 KB
Totzeit-controller-symbol-1.svg 300 × 150; 4 KB
-
 Tutg.svg 320 × 260; 14 KB
Tutg.svg 320 × 260; 14 KB
-
 Understanding Systems.svg 333 × 190; 22 KB
Understanding Systems.svg 333 × 190; 22 KB
-
 VC2.svg 100 × 100; 381 bytes
VC2.svg 100 × 100; 381 bytes
-
 VC3.svg 100 × 100; 3 KB
VC3.svg 100 × 100; 3 KB
-
 VC4.svg 100 × 100; 421 bytes
VC4.svg 100 × 100; 421 bytes
-
 Zeroorderhold.impulseresponse.svg 567 × 354; 1 KB
Zeroorderhold.impulseresponse.svg 567 × 354; 1 KB
-
 Zeroorderhold.signal.svg 585 × 335; 7 KB
Zeroorderhold.signal.svg 585 × 335; 7 KB
-
 Zobel (1) Bridge.svg 350 × 300; 2 KB
Zobel (1) Bridge.svg 350 × 300; 2 KB
-
 Zobel (2) Transfer.svg 300 × 200; 1 KB
Zobel (2) Transfer.svg 300 × 200; 1 KB
-
 Zobel (3) Bridge T.svg 350 × 250; 2 KB
Zobel (3) Bridge T.svg 350 × 250; 2 KB





.svg)






































































_Bridge.svg)
_Bridge_T.svg)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
_Transfer.svg){kind=link}